














What are the components of a control system?
For the design of most control systems, it generally consists of four parts: input, output, control elements and algorithms. In a simple robot system, the corresponding originals are:
1. Input: Sensors, including sonar, infrared, camera, gyroscope, accelerometer, compass, etc.
2. Output: Control elements, usually motors;
3. Control arithmetic: control board, from small to single-chip, from large to micro-computer;
4. Control objectives: such as robot path tracking.
What is the control system of robots?
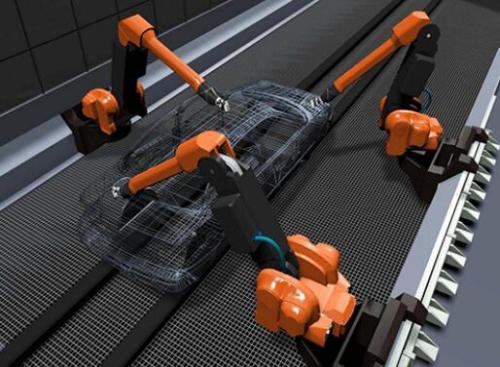
The function of the robot control system is to receive the detection signals from sensors. According to the requirements of the operation tasks, the motors in the manipulator are driven. Just as our human activities need to depend on our own joints, the motion control of the robot can not be separated from sensors. Robots need sensors to detect all kinds of states. The internal sensor signals of the robot are used to reflect the actual motion state of the joint of the manipulator. The external sensor signals of the robot are used to detect the changes of the working environment. So the nerve and brain of the robot can be combined to form a complete robot control system. Unification.
What are the aspects of robot motion control system?
Actuator - servo motor or stepping motor;
Driving mechanism - servo or stepping driver;
Control mechanism - motion controller, algorithm operation control of path and motor linkage;
Control mode - If there is a fixed execution mode, program the fixed parameters to the motion controller; if there is a visual system or other sensors, according to the sensor signal, program the fixed parameters to the motion controller.
Introduction of Industrial Robot Control System
1. Hardware Structure of Industrial Robot Control System
Controller is the core of robot system. Foreign companies have imposed a strict technical blockade on our country, and the development of domestic technology is limited. In recent years, with the development of microelectronics technology, microprocessors are getting more and more high performance, but the price is getting cheaper and cheaper. At present, 32-bit microprocessors of $1-2 have appeared in the market. High cost performance microprocessors bring new opportunities for the development of robotic controllers, making it possible to develop low-cost, high-performance robotic controllers. In order to ensure that the system has sufficient computing and storage capacity, the current robot controller mostly uses ARM series, DSP series, POWERPC series, Intel series chips with strong computing power.
2. Architecture of Industrial Robot Control System
In the aspect of controller architecture, its research focuses on the specification of function partition and information exchange between functions. In the research of open controller architecture, there are two basic structures. One is based on hardware hierarchical partition. The structure of this type is relatively simple. In Japan, the architecture is based on hardware. For example, Mitsubishi Heavy Industries Corporation has divided the structure of PA210 portable universal intelligent arm robot produced by Mitsubishi Heavy Industries Corporation. It is divided into five layers. The other is based on function partition. It considers both hardware and software. It is the direction of the research and development of robot controller architecture.
Basic Functions of Industrial Robot Control System
Robot control system is an important part of the robot. It is used to control the robot to accomplish specific tasks. What functions does it have?
1. Memory function: Store operation sequence, movement path, movement mode, movement speed and information related to production process.
2. Teaching function: Off-line programming, on-line teaching, indirect teaching. Online teaching includes teaching box and guide teaching.
3. Contact function with peripheral equipment: input and output interface, communication interface, network interface, synchronization interface.
4. Function of coordinate setting: four coordinate systems: joint, absolute, tool and user-defined.
5. Man-machine interface: teaching box, operation panel and display screen.
6. Sensor interface: position detection, vision, touch, force, etc.
7. Position servo function: multi-axis linkage, motion control, speed and acceleration control, dynamic compensation and so on.
8. Safety protection function of fault diagnosis: system state monitoring during operation, safety protection under fault state and fault self-diagnosis.
About the robot control system, Xiaobian has just introduced it here. China's domestic robots will develop rapidly in the next few years. The domestic robotic controller application market is facing a better development opportunity. Let's work together.
Product recommendation

TECHNICAL SOLUTION
MORE+You may also be interested in the following information



FREE CONSULTING SERVICE
Let’s help you to find the right solution for your project!
 ASK POMEAS
ASK POMEAS  PRICE INQUIRY
PRICE INQUIRY  REQUEST DEMO/TEST
REQUEST DEMO/TEST  FREE TRIAL UNIT
FREE TRIAL UNIT  ACCURATE SELECTION
ACCURATE SELECTION - APPICATION CASE
- RESOURCE CENTER
- DOWNLOAD CENTER
SOLUTIONS SUPPORT
- ZOOM LENS SELECTION TOOL
- TELECENTRIC LENS SELECTION TOOL
- FA LENS SELECTION TOOL
- ZOOM RATIO TABLE
- CERTIFIED MODEL
SELECTION TOOL
- WHY POMEAS
- FAQ
- PRIVACY POLICY
- TERMS OF USE
- DELIVERY & RETURN POLICY
CUSTOMER CARE
 ADDRESS
ADDRESS
Add.:No.68, Yongwei Road, Baizhoubian, Dongcheng District, Dongguan, China,523000
CONTACT
 Tel:+ 86-0769-2266 0867
Tel:+ 86-0769-2266 0867
 Fax:+ 86-0769-2266 0867
Fax:+ 86-0769-2266 0867
 E-mail:marketing@pomeas.com
E-mail:marketing@pomeas.com

Wechat QR code
Software Copyright :2021SR0176001 抄袭必究, 技术支持:誉新源科技